

ROBÓTICA INDUSTRIAL
DOBLE TITULACIÓN DE GRADO EN INGENIERÍA MECÁNICA Y EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA
Curso 2021/2022
1. Datos de la asignatura
(Fecha última modificación: 02-05-21 10:38)- Código
- 106427
- Plan
- ECTS
- 6
- Carácter
- Curso
- 4
- Periodicidad
- Segundo Semestre
- Idioma
- ESPAÑOL
- Área
- INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
- Departamento
- Informática y Automática
- Plataforma Virtual
Datos del profesorado
- Profesor/Profesora
- Antonio Cembellín Sánchez
- Grupo/s
- 1
- Centro
- E.T.S. Ingeniería Industrial de Béjar
- Departamento
- Informática y Automática
- Área
- Ingeniería de Sistemas y Automática
- Despacho
- Nº 16 (3ª planta)
- Horario de tutorías
- Lunes, martes y miércoles de 12:00 h. a 14:00 h.
- URL Web
- -
- cembe@usal.es
- Teléfono
- 923 408080 ext. 2237
2. Sentido de la materia en el plan de estudios
Bloque formativo al que pertenece la materia.
Se encuadra dentro del grupo de asignaturas de especialización en Automática adscritas al área de Ingeniería de Sistemas y Automática: Automatización Industrial, Modelado y Simulación, Regulación Automática, Robótica Industrial, Informática Industrial, Control Avanzado y Control Inteligente.
Papel de la asignatura.
Se trata de una asignatura dedicada al estudio de sistemas robotizados empleados fundamentalmente en procesos de fabricación industrial.
Perfil profesional.
Esta asignatura contribuye a que los alumnos sean capaces de implantar y programar robots industriales, habilitándoles para poder desarrollar esa actividad profesional.
3. Recomendaciones previas
- Conocimientos de Informática, Máquinas Eléctricas, Electrónica Analógica y Digital.
- Conocimientos sobre fundamentos de Automática, Regulación Automática y Automatización Industrial.
4. Objetivo de la asignatura
- Conocer los elementos que integran un sistema robotizado así como sus características y funcionamiento.
- Conocer y utilizar correctamente las herramientas matemáticas utilizadas en Mecánica de Robots.
- Adquirir la metodología para el modelado y análisis de un manipulador robótico.
- Manejar con soltura herramientas software para análisis de robots (MATLAB/SIMULINK).
- Resolver problemas de Robótica Industrial de diferente grado de dificultad.
- Conocer y comprender los diferentes modos de programación de robots industriales y algunos lenguajes de programación.
- Conocer las aplicaciones y criterios más importantes de selección de un robot industrial.
5. Contenidos
Teoría.
TEMA 1: Introducción a la Robótica. Morfología del robot.
TEMA 2: Herramientas matemáticas para la localización espacial.
TEMA 3: Cinemática del robot.
TEMA 4: Dinámica del robot.
TEMA 5: Control cinemático.
TEMA 6: Control dinámico.
TEMA 7: Programación de robots.
TEMA 8: Aplicaciones y criterios de implantación de un robot.
Práctica.
PRÁCTICAS DE ANÁLISIS Y SIMULACIÓN: MATLAB/SIMULINK (AULA DE INFORMÁTICA)
- Herramientas matemáticas para la localización espacial
- Cinemática del robot.
- Dinámica del robot.
- Control cinemático.
- Control dinámico.
PRÁCTICAS CON ROBOT DIDÁCTICO MENTOR (AULA DE AUTOMÁTICA)
- Estudio de la precisión del robot.
- Determinación del espacio de trabajo. Cinemática del robot.
PRÁCTICAS DE PROGRAMACIÓN Y SIMULACIÓN: COSIMIR (AULA DE INFORMÁTICA)
1. Programación de un robot industrial y simulación del movimiento.
6. Competencias a adquirir
Específicas.
CEI09 Conocimientos de los principios y aplicaciones de los sistemas robotizados.
Transversales.
CT1: Capacidad de análisis y síntesis.
CT2: Capacidad de organización y planificación.
CT4: Resolución de problemas.
CT8: Aprendizaje autónomo.
7. Metodologías
Actividades dirigidas por el profesor:
- Sesiones magistrales (exposición de contenidos teóricos en el aula).
- Prácticas en el aula (resolución de problemas y ejercicios).
- Prácticas en el laboratorio (ejercicios prácticos con equipos).
- Prácticas en el aula de informática (análisis y simulación mediante herramientas software).
- Seminarios de resolución de problemas y ejercicios.
- Tutorías de atención al alumno.
Actividades autónomas del alumno:
- Resolución de problemas.
- Preparación y realización de trabajos.
- Estudio personal del alumno.
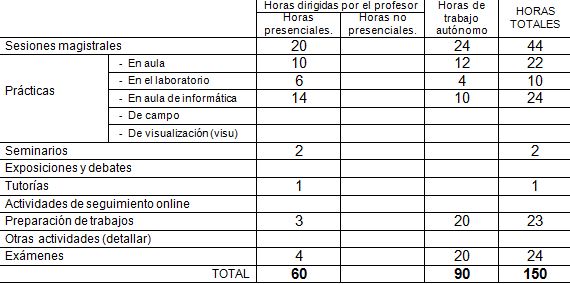
8. Previsión de Técnicas (Estrategias) Docentes
9. Recursos
Libros de consulta para el alumno.
BARRIENTOS, A. et al. “Fundamentos de Robótica”. Ed. McGraw-Hill, 2007.
FU, K.S.; GONZÁLEZ, R.C.; LEE, C.S.G. “Robótica: control, detección, visión e inteligencia”. Ed. McGraw-Hill, 1988.
RENTERÍA, A. et al. “Robótica Industrial”. Ed. McGraw-Hill, 2000.
TORRES, F. et al. “Robots y sistemas sensoriales”. Ed. Prentice-Hall, 2002.
Otras referencias bibliográficas, electrónicas o cualquier otro tipo de recurso.
Enlaces web de robots industriales comerciales:
abb, fanuc, kuka, motoman, adept,…
www.petercorke.com/ (Toolbox Robotics. MATLAB).
10. Evaluación
Consideraciones generales.
Según se establece en la Memoria del Título de Grado, para la evaluación de las competencias se utilizará un sistema mixto basado en evaluación continua y en un examen final.
La asistencia a prácticas tiene carácter obligatorio. Se deberá entregar un informe sobre las prácticas realizadas que se tendrá en cuenta en la calificación final.
Criterios de evaluación.
Las pruebas de evaluación continua tendrán como máximo una valoración de 3 puntos sobre la nota final de la asignatura e incluyen la parte de prácticas de la asignatura que se valorará sobre 1 punto. El examen final se valorará sobre 7 puntos del total de la asignatura.
En el examen final se considerarán 2 partes: una parte teórica con preguntas cortas sobre un aspecto concreto, donde se evaluará tanto el dominio de los conceptos teóricos como la capacidad de razonamiento de los alumnos, y de varios problemas en los que se evaluará si los alumnos conocen y aplican correctamente los métodos de resolución de problemas.
Instrumentos de evaluación.
Evaluación de contenidos: Pruebas de evaluación continua e Informes de Prácticas + Examen escrito (cuestiones teóricas + problemas).
Recomendaciones para la evaluación.
- Seguimiento de las clases tanto teóricas como prácticas.
- Realización de las pruebas de evaluación continua.
- Realización de problemas y ejercicios.
- Estudio personal del alumno.
- Asistencia a tutorías para orientación y resolución de dudas.
Recomendaciones para la recuperación.
- Detectar las deficiencias en la adquisición de competencias.
- Corregir esas deficiencias insistiendo en los aspectos de mayor dificultad.