

MECÁNICA DE ROBOTS
DOBLE TITULACIÓN GRADO EN ING. ELÉCTRICA / GRADO EN ING. MECÁNICA
Curso 2023/2024
1. Datos de la asignatura
(Fecha última modificación: 18-04-23 17:17)- Código
- 106534
- Plan
- ECTS
- 6
- Carácter
- Curso
- 5
- Periodicidad
- Primer Semestre
- Idioma
- ESPAÑOL
- Área
- INGENIERÍA MECÁNICA
- Departamento
- Ingeniería Mecánica
- Plataforma Virtual
Datos del profesorado
- Profesor/a
- Fidel Hugo Perera Martínez
- Grupo/s
- 1
- Centro
- E.T.S. Ingeniería Industrial de Béjar
- Departamento
- Ingeniería Mecánica
- Área
- Ingeniería Mecánica
- Despacho
- Tercera Planta, FabLab Béjar
- Horario de tutorías
- X – J 13:00h – 14:00h
- URL Web
- -
- hugoperera@usal.es
- Teléfono
- -
2. Sentido de la materia en el plan de estudios
Bloque formativo al que pertenece la materia.
Comunes a la ingeniería.
Papel de la asignatura.
Materia que permitirá a los estudiantes el conocimiento del análisis de posición, cinemático y dinámico de robots industriales.
Perfil profesional.
Ingeniería Industrial.
3. Recomendaciones previas
- Conocimientos del análisis mecánico del sólido rígido.
- Conocimiento del análisis de posición, cinemático y dinámico de mecanismos planos.
4. Objetivo de la asignatura
Completar la formación del estudiante en lo referente al estudio de mecanismos espaciales mediante el análisis de posición, cinemático y dinámico de manipuladores.
5. Contenidos
Teoría.
- Tema 1: Introducción
- Tema 2: Análisis de posición.
- Tema 3: Cinemática de manipuladores.
- Tema 4: Dinámica de manipuladores.
Práctica.
- Práctica 1: Especificaciones técnicas robot ABB IRB140
- Práctica 2: Análisis de posición con el robot ABB IRB 140
- Práctica 3: Simulación de procesos con el robot ABB IRB 140.
6. Competencias a adquirir
Específicas.
CE11.- Análisis y resolución de problemas de posicionamiento de robots con propósitos específicos.
Transversales.
- CT1: Capacidad de análisis y síntesis.
- CT4: Resolución de problemas.
7. Metodologías
Actividades introductorias (dirigidas por el profesor)
Actividades introductorias
Actividades teóricas (dirigidas por el profesor)
Sesión magistral
Actividades prácticas guiadas (dirigidas por el profesor)
Prácticas en el aula
Atención personalizada (dirigida por el profesor)
Tutorías
Actividades prácticas autónomas (sin el profesor)
Trabajos
Preparación de trabajos
Resolución de problemas
Pruebas de evaluación
Pruebas objetivas de preguntas cortas
Pruebas prácticas.
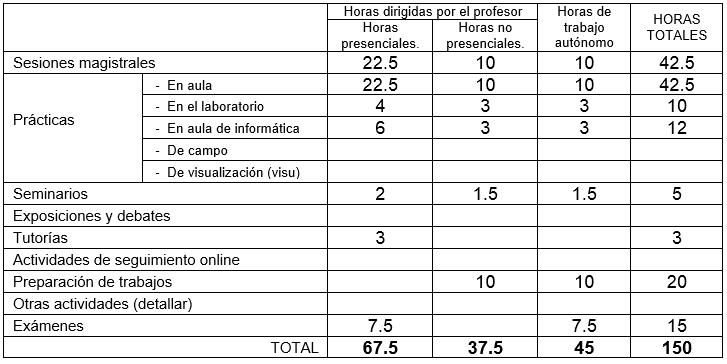
8. Previsión de Técnicas (Estrategias) Docentes
9. Recursos
Libros de consulta para el alumno.
- J. Angeles. Fundamentals of Robotic Mechanical Systems. 2014. Ed. Springer Verlag (New York, 1997). ISBN: 978-3-319-01850-8.
- J.J. Craig. Robótica. 2006. 3ª edición. Ed. Pearson Prentice Hall. ISBN: 978-9702607724.
- Lung T. Tsai. Robot Analysis. The Mechanics of Serial and Parallel Manipulators. 1999. Ed. John Wiley & Sons (Nueva York). ISBN: 0-471-32593-7
- A. Barrientos, L.F. Peñin, C. Balaguer, R. Aracil. Fundamentos de Robótica. 2007. 2ª edición. Ed. Mc Graw Hill. ISBN: 9788448156367.
- V. Mata, F. Valero, J.I. Cuadrado. Mecánica de Robots. 1995. Colección Libro-Apunte nº 16, Ed. Universidad Politécnica de Valencia (Valencia). ISBN: 84-7721-303-8.
- A. Hernández. Cinemática de Mecanismos. Análisis y diseño. 2011. 1ª edición. Ed. Síntesis (Madrid). ISBN: 84-9756-224-0.
- F. Torres, J. Pomares, P. Gil, S.T. Puente, R. Arcil. Robots y Sistemas Sensoriales. 2002. Ed. Pearson Prentice Hall. ISBN: 84-205-3574-5.
- K.S. Fu, R.C. González, C.S.G. Lee. Robótica: Control, Detección, Visión e Inteligencia. 1989. Ed. McGraw-Hill (México). ISBN: 84-7615-2140.
- F.P. Beer, E.R. Johnston. Mecánica vectorial para ingenieros: Dinámica. 2007. 11ª edición. Ed. Mc-Graw Hill. ISBN: 9781456255268.
Otras referencias bibliográficas, electrónicas o cualquier otro tipo de recurso.
- J. Angeles. Fundamentals of Robotic Mechanical Systems. 2014. Ed. Springer Verlag (New York, 1997). ISBN: 978-3-319-01850-8.
- J.J. Craig. Robótica. 2006. 3ª edición. Ed. Pearson Prentice Hall. ISBN: 978-9702607724.
- Lung T. Tsai. Robot Analysis. The Mechanics of Serial and Parallel Manipulators. 1999. Ed. John Wiley & Sons (Nueva York). ISBN: 0-471-32593-7
- A. Barrientos, L.F. Peñin, C. Balaguer, R. Aracil. Fundamentos de Robótica. 2007. 2ª edición. Ed. Mc Graw Hill. ISBN: 9788448156367.
- V. Mata, F. Valero, J.I. Cuadrado. Mecánica de Robots. 1995. Colección Libro-Apunte nº 16, Ed. Universidad Politécnica de Valencia (Valencia). ISBN: 84-7721-303-8.
- A. Hernández. Cinemática de Mecanismos. Análisis y diseño. 2011. 1ª edición. Ed. Síntesis (Madrid). ISBN: 84-9756-224-0.
- F. Torres, J. Pomares, P. Gil, S.T. Puente, R. Arcil. Robots y Sistemas Sensoriales. 2002. Ed. Pearson Prentice Hall. ISBN: 84-205-3574-5.
- K.S. Fu, R.C. González, C.S.G. Lee. Robótica: Control, Detección, Visión e Inteligencia. 1989. Ed. McGraw-Hill (México). ISBN: 84-7615-2140.
- F.P. Beer, E.R. Johnston. Mecánica vectorial para ingenieros: Dinámica. 2007. 11ª edición. Ed. Mc-Graw Hill. ISBN: 9781456255268.
10. Evaluación
Consideraciones generales.
Se establecerá el grado de adquisición de las competencias propias de la asignatura a través de un proceso de evaluación continua.
Criterios de evaluación.
Exámenes escritos de conocimientos generales y resolución de problemas: 70%
Prácticas/Seminarios: 25%
Trabajos prácticos y problemas propuestos/Studium: 5%
El porcentaje correspondiente a las calificaciones de la evaluación continua se aplicará a partir de una nota mínima de 5 en las evaluaciones finales.
Instrumentos de evaluación.
Pruebas escritas. CE11, CT1, CT4.
Resolución de problemas y trabajos. CE11, CT1, CT4.
Recomendaciones para la evaluación.
Los trabajos e informes de prácticas serán realizados y entregados por el estudiante en tiempo de acuerdo con los plazos establecidos a lo largo del curso.
Se darán a conocer previamente los criterios de valoración.
Recomendaciones para la recuperación.
El estudiante en cada caso realizará la recuperación en función de los resultados obtenidos en la evaluación continua.