

ROBÓTICA INDUSTRIAL
DOBLE TITULACIÓN GRADO ING. ELÉCTRICA E ING. ELECTR. INDUSTRIAL Y AUTOM.
Curso 2024/2025
1. Datos de la asignatura
(Fecha última modificación: 15-05-24 9:26)- Código
- 106427
- Plan
- ECTS
- 6
- Carácter
- Curso
- 4
- Periodicidad
- Segundo Semestre
- Idioma
- ESPAÑOL
- Área
- INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
- Departamento
- Informática y Automática
- Plataforma Virtual
Datos del profesorado
- Profesor/a
- Antonio Cembellín Sánchez
- Grupo/s
- 1
- Centro
- E.T.S. Ingeniería Industrial de Béjar
- Departamento
- Informática y Automática
- Área
- Ingeniería de Sistemas y Automática
- Despacho
- Nº 16 (3ª planta)
- Horario de tutorías
- Lunes, martes y miércoles de 12:00 h. a 14:00 h.
- URL Web
- https://produccioncientifica.usal.es/investigadores/56170/detalle
- cembe@usal.es
- Teléfono
- 923 408080 ext. 2237
2. Recomendaciones previas
- Conocimientos de Informática, Máquinas Eléctricas, Electrónica Analógica y Digital.
- Conocimientos sobre fundamentos de Automática, Regulación Automática y Automatización Industrial.
3. Objetivos
- Conocer los elementos que integran un sistema robotizado así como sus características y funcionamiento.
- Conocer y utilizar correctamente las herramientas matemáticas utilizadas en Mecánica de Robots.
- Adquirir la metodología para el modelado y análisis de un manipulador robótico.
- Manejar con soltura herramientas software para análisis de robots (MATLAB/SIMULINK).
- Resolver problemas de Robótica Industrial de diferente grado de dificultad.
- Conocer y comprender los diferentes modos de programación de robots industriales y algunos lenguajes de programación.
- Conocer las aplicaciones y criterios más importantes de selección de un robot industrial.
4. Competencias a adquirir | Resultados de Aprendizaje
Específicas | Habilidades.
CEI09 Conocimientos de los principios y aplicaciones de los sistemas robotizados.
Transversales | Competencias.
CT1: Capacidad de análisis y síntesis.
CT2: Capacidad de organización y planificación.
CT4: Resolución de problemas.
CT8: Aprendizaje autónomo.
5. Contenidos
Teoría.
TEMA 1: Introducción a la Robótica. Morfología del robot.
TEMA 2: Herramientas matemáticas para la localización espacial.
TEMA 3: Cinemática del robot.
TEMA 4: Dinámica del robot.
TEMA 5: Control cinemático.
TEMA 6: Control dinámico.
TEMA 7: Programación de robots.
TEMA 8: Aplicaciones y criterios de implantación de un robot.
Práctica.
PRÁCTICAS DE ANÁLISIS Y SIMULACIÓN: MATLAB/SIMULINK (AULA DE INFORMÁTICA)
- Herramientas matemáticas para la localización espacial
- Cinemática del robot.
- Dinámica del robot.
- Control cinemático.
- Control dinámico.
PRÁCTICAS CON ROBOT DIDÁCTICO MENTOR (AULA DE AUTOMÁTICA)
- Estudio de la precisión del robot.
- Determinación del espacio de trabajo. Cinemática del robot.
PRÁCTICAS DE PROGRAMACIÓN Y SIMULACIÓN: COSIMIR (AULA DE INFORMÁTICA)
1. Programación de un robot industrial y simulación del movimiento.
6. Metodologías Docentes
Actividades dirigidas por el profesor:
- Sesiones magistrales (exposición de contenidos teóricos en el aula).
- Prácticas en el aula (resolución de problemas y ejercicios).
- Prácticas en el laboratorio (ejercicios prácticos con equipos).
- Prácticas en el aula de informática (análisis y simulación mediante herramientas software).
- Seminarios de resolución de problemas y ejercicios.
- Tutorías de atención al alumno.
Actividades autónomas del alumno:
- Resolución de problemas.
- Preparación y realización de trabajos.
- Estudio personal del alumno.
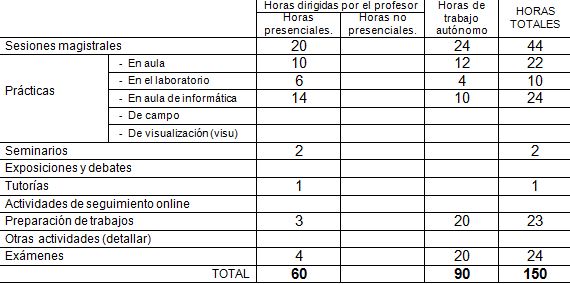
7. Distribución de las Metodologías Docentes
8. Recursos
Libros de consulta para el alumno.
BARRIENTOS, A. et al. “Fundamentos de Robótica”. Ed. McGraw-Hill, 2007.
FU, K.S.; GONZÁLEZ, R.C.; LEE, C.S.G. “Robótica: control, detección, visión e inteligencia”. Ed. McGraw-Hill, 1988.
RENTERÍA, A. et al. “Robótica Industrial”. Ed. McGraw-Hill, 2000.
TORRES, F. et al. “Robots y sistemas sensoriales”. Ed. Prentice-Hall, 2002.
Otras referencias bibliográficas, electrónicas o cualquier otro tipo de recurso.
Enlaces web de robots industriales comerciales:
abb, fanuc, kuka, motoman, adept,…
www.petercorke.com/ (Toolbox Robotics. MATLAB).
9. Evaluación
Criterios de evaluación.
Las pruebas de evaluación continua tendrán como máximo una valoración de 3 puntos sobre la nota final de la asignatura e incluyen la parte de prácticas de la asignatura que se valorará sobre 1 punto. El examen final se valorará sobre 7 puntos del total de la asignatura.
En el examen final se considerarán 2 partes: una parte teórica con preguntas cortas sobre un aspecto concreto, donde se evaluará tanto el dominio de los conceptos teóricos como la capacidad de razonamiento de los alumnos, y de varios problemas en los que se evaluará si los alumnos conocen y aplican correctamente los métodos de resolución de problemas.
Sistemas de evaluación.
Evaluación de contenidos: Pruebas de evaluación continua e Informes de Prácticas + Examen escrito (cuestiones teóricas + problemas).
Recomendaciones para la evaluación.
Según se establece en la Memoria del Título de Grado, para la evaluación de las competencias se utilizará un sistema mixto basado en evaluación continua y en un examen final.
La asistencia a prácticas tiene carácter obligatorio. Se deberá entregar un informe sobre las prácticas realizadas que se tendrá en cuenta en la calificación final.
- Seguimiento de las clases tanto teóricas como prácticas.
- Realización de las pruebas de evaluación continua.
- Realización de problemas y ejercicios.
- Estudio personal del alumno.
- Asistencia a tutorías para orientación y resolución de dudas.
Detectar las deficiencias en la adquisición de competencias.
Corregir esas deficiencias insistiendo en los aspectos de mayor dificultad.