

REGULACIÓN AUTOMÁTICA
GRADO EN INGENIERÍA MECÁNICA (E.T.S. de Ingeniería Industrial de Béjar)
Curso 2024/2025
1. Datos de la asignatura
(Fecha última modificación: 28-05-24 10:11)- Código
- 106551
- Plan
- ECTS
- 6.00
- Carácter
- OPTATIVA
- Curso
- 4
- Periodicidad
- Segundo Semestre
- Idioma
- ESPAÑOL
- Área
- INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
- Departamento
- Informática y Automática
- Plataforma Virtual
Datos del profesorado
- Profesor/a
- Antonio Cembellín Sánchez
- Grupo/s
- 1
- Centro
- E.T.S. Ingeniería Industrial de Béjar
- Departamento
- Informática y Automática
- Área
- Ingeniería de Sistemas y Automática
- Despacho
- Nº 16 (3ª planta)
- Horario de tutorías
- Prof. Antonio Cembellín Sánchez: Lunes, martes y miércoles de 12:00h. a 14:00h. Prof. Mario Francisco Sutil: Martes de 11:00 a 12:00 y 15:30 a 17:30; Jueves de 13:00 a 14:00 y 17:30 a 19:30h.
- URL Web
- https://produccioncientifica.usal.es/investigadores/56170/detalle
- cembe@usal.es
- Teléfono
- 923 408080 ext. 2237
- Profesor/Profesora
- Silvana Roxani Revollar Chávez
- Grupo/s
- 1
- Centro
- E.T.S. Ingeniería Industrial de Béjar
- Departamento
- Informática y Automática
- Área
- Ingeniería de Sistemas y Automática
- Despacho
- D4105 Ático Dpto. informática y Automática/ ETSII Béjar, 3ª planta
- Horario de tutorías
- -
- URL Web
- http://studium.usal.es
- srevolla@usal.es
- Teléfono
- 923294500 Ext. 5554
2. Recomendaciones previas
- Conocimientos de Informática, Electrónica Analógica y Digital.
- Conocimientos sobre fundamentos de Automática.
- Operar correctamente con números complejos.
3. Objetivos
Conocer los elementos que integran un sistema de control de procesos industriales, así como sus características y funcionamiento.
- Conocer y comprender el funcionamiento de la tecnología utilizada en sistemas de control digital: sensores, actuadores, reguladores.
- Adquirir la metodología para el modelado, diseño y simulación de sistemas de control digital, así como su implementación.
- Manejar con soltura herramientas software para análisis, diseño y simulación de sistemas de control digital (MATLAB/SIMULINK).
- Resolver problemas de control digital de diferente grado de dificultad.
- Conocer y comprender el modo de implementar algoritmos de control mediante diferentes lenguajes de programación.
4. Competencias a adquirir | Resultados de Aprendizaje
Específicas | Habilidades.
- CEI08: Conocimientos de los principios de la Regulación Automática y su aplicación a la automatización industrial.
- CEI11: Capacidad para diseñar sistemas de control y automatización industrial.
Transversales | Competencias.
- CT1: Capacidad de análisis y síntesis.
- CT2: Capacidad de organización y planificación.
- CT3: Comunicación oral y escrita en la lengua nativa.
- CT4: Resolución de problemas.
- CT5: Trabajo en equipo.
- CT8: Aprendizaje autónomo.
5. Contenidos
Teoría.
CONTROL DE PROCESOS POR COMPUTADOR. SISTEMAS DE CONTROL DIGITAL
- TEMA 1: Control en tiempo continuo y en tiempo discreto: Sistemas de Control Digital.
- TEMA 2: Muestreo y reconstrucción de señales continuas. Sistemas discretos y muestreados.
- TEMA 3: Análisis temporal de sistemas discretos y muestreados. Estabilidad y precisión.
- TEMA 4: Análisis frecuencial de sistemas continuos, discretos y muestreados.
- TEMA 5: Diseño de reguladores en tiempo continuo y en tiempo discreto.
- TEMA 6: Configuraciones industriales de regulación con computador.
INFORMÁTICA INDUSTRIAL DE CONTROL: HARDWARE Y SOFTWARE
- TEMA 7: Estructura de los sistemas informáticos de control. Control centralizado y Control Distribuido. Equipos para el control de procesos por computador.
- TEMA 8: Software para control digital: sistemas operativos y lenguajes de programación.
Práctica.
PRÁCTICAS DE ANÁLISIS, DISEÑO Y SIMULACIÓN ASISTIDOS POR ORDENADOR: MATLAB/SIMULINK (AULA DE INFORMÁTICA)
- Modelado de sistemas discretos de control.
- Análisis temporal de sistemas discretos de control.
- Análisis frecuencial y del lugar de las raíces de sistemas de control.
- Diseño de sistemas de control basado en métodos analíticos.
- Diseño de sistemas de control basado en el lugar de las raíces.
- Diseño de sistemas de control basado en la respuesta en frecuencia (I).
- Diseño de sistemas de control basado en la respuesta en frecuencia (II).
- Otras configuraciones de control digital: control en cascada y control feedforward, predictor de Smith.
PRÁCTICAS CON EQUIPOS (AULA DE AUTOMÁTICA)
- Estudio de un sistema de control digital de velocidad de un motor de c.c.
- Estudio de un sistema de control digital de posición de un motor de c.c.
- Estudio de un sistema de control digital de nivel de líquido.
- Estudio de un sistema de control digital de caudal de un fluido.
- Modelado e identificación de un motor de c.c. Ajuste de un controlador PID mediante métodos empíricos.
- Modelado e identificación de un depósito de líquido. Ajuste de un controlador PID mediante métodos empíricos.
6. Metodologías Docentes
Actividades dirigidas por el profesor:
- Sesiones magistrales (exposición de contenidos teóricos en el aula).
- Prácticas en el aula (resolución de problemas y ejercicios).
- Prácticas en el laboratorio (ejercicios prácticos con equipos).
- Prácticas en el aula de informática (análisis, diseño y simulación de sistemas de control mediante herramientas software: MATLAB/SIMULINK).
- Seminarios de resolución de problemas y ejercicios.
- Tutorías de atención al alumno.
Actividades autónomas del alumno:
- Resolución de problemas.
- Preparación y realización de trabajos.
- Estudio personal del alumno.
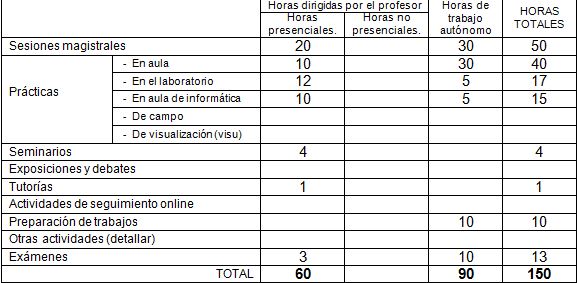
7. Distribución de las Metodologías Docentes
8. Recursos
Libros de consulta para el alumno.
ASTRÖM, K.J. y WITTENMARK, B. “Sistemas controlados por ordenador”. Ed. Paraninfo, 1988.
ARACIL SANTONJA, R. y JIMÉNEZ AVELLÓ, A. “Sistemas discretos de control (representación externa)”. Sección de Publicaciones de la Universidad Politécnica de Madrid, 1993.
CREUS SOLÉ, A. “Instrumentación industrial”. Ed. Marcombo, 2005.
GÓMEZ CAMPOMANES, J. “Problemas resueltos de Control Digital”. Ed. Thomson-Paraninfo, 2008.
KUO, B. " Sistemas automáticos de control " (7ª Edición). Ed. Prentice-Hall, 1996.
LÓPEZ GARCÍA, H. “Control por computador. Diseño y realización práctica”. Univ. de Oviedo, 1993.
OGATA, K. “Sistemas de control en tiempo discreto”. Ed. Prentice-Hall, 1996.
PHILLIPS, C.L. y NAGLE, H.T. “Sistemas de control digital. Análisis y diseño”. Ed. Gustavo Gili, 1987.
Otras referencias bibliográficas, electrónicas o cualquier otro tipo de recurso.
Manuales de MATLAB y SIMULINK.
Enlaces:
http://www.siemens.com, http://www.rockwellautomation.com/ , http://honeywell.com/ http://www.instrumentacionycontrol.net/, http://www.mathworks.es/
9. Evaluación
Criterios de evaluación.
Las pruebas de evaluación continua tendrán como máximo una valoración de 3 puntos sobre la nota final de la asignatura e incluyen la parte de prácticas de la asignatura que se valorará sobre 1 punto. El examen final se valorará sobre 7 puntos del total de la asignatura.
En el examen final se considerarán 2 partes: una parte teórica con preguntas cortas sobre un aspecto concreto, donde se evaluará tanto el dominio de los conceptos teóricos como la capacidad de razonamiento de los alumnos, y de varios problemas en los que se evaluará si los alumnos conocen y aplican correctamente los métodos de resolución de problemas.
Sistemas de evaluación.
Evaluación de contenidos: Pruebas de evaluación continua e Informes de Prácticas + Examen escrito (cuestiones teóricas + problemas).
Recomendaciones para la evaluación.
Según se establece en la Memoria del Título de Grado, para la evaluación de las competencias se utilizará un sistema mixto basado en evaluación continua y en un examen final.
La asistencia a prácticas tiene carácter obligatorio. Se deberá entregar un informe sobre las prácticas realizadas que se tendrá en cuenta en la calificación final.
-Seguimiento de las clases tanto teóricas como prácticas.
- Realización de las pruebas de evaluación continua.
- Realización de problemas y ejercicios.
- Estudio personal del alumno.
- Asistencia a tutorías para orientación y resolución de dudas.
- Detectar las deficiencias en la adquisición de competencias.
- Corregir esas deficiencias insistiendo en los aspectos de mayor dificultad.