

FUNDAMENTOS DE AUTOMÁTICA
GRADO EN INGENIERÍA MECÁNICA
Curso 2025/2026
1. Datos de la asignatura
(Fecha última modificación: 20-01-26 11:03)- Código
- 106515
- Plan
- ECTS
- 6.00
- Carácter
- OBLIGATORIA
- Curso
- 2
- Periodicidad
- Segundo Semestre
- Idioma
- ESPAÑOL
- Área
- LENGUAJES Y SISTEMAS INFORMÁTICOS
- Departamento
- Informática y Automática
- Plataforma Virtual
Datos del profesorado
- Profesor/a
- Hernando Silva Varela
- Grupo/s
- 1
- Centro
- E. Politécnica Superior de Zamora
- Departamento
- Informática y Automática
- Área
- Lenguajes y Sistemas Informáticos
- Despacho
- Despacho 122 / 234. Edificio Administrativo
- Horario de tutorías
- --
- URL Web
- http://web.usal.es/hernando/
- hernando@usal.es
- Teléfono
- 923294500 Ext. 3746
- Profesor/a
- Jesús Ángel Román Gallego
- Grupo/s
- 1
- Centro
- E. Politécnica Superior de Zamora
- Departamento
- Informática y Automática
- Área
- Lenguajes y Sistemas Informáticos
- Despacho
- Despacho 214. Edificio Administrativo
- Horario de tutorías
- Lunes, Martes de 16:00 a 20:00
Solicitar cita previa por correo electrónico.
- URL Web
- https://produccioncientifica.usal.es/investigadores/57456/detalle
- zjarg@usal.es
- Teléfono
- 923294500 Ext. 3745
2. Recomendaciones previas
Se recomienda que el estudiante tenga conocimientos previos en matemáticas aplicadas, así como una comprensión básica de física (mecánica y electricidad). También es aconsejable estar familiarizado con el análisis de sistemas dinámicos y el uso de herramientas informáticas para simulación técnica. Estas bases facilitarán la comprensión del modelado, análisis y diseño de sistemas de control, y permitirán aprovechar al máximo su enfoque práctico
3. Objetivos
Los objetivos que se plantean en esta asignatura son los siguientes:
• Comprender los conceptos fundamentales de los sistemas de control automático y su clasificación.
• Identificar y describir los componentes principales de un sistema de control en ingeniería mecatrónica (sensor, actuador, planta, controlador).
• Conocer el modelado de sistemas físicos mediante ecuaciones diferenciales, funciones de transferencia y representaciones en espacio de estados.
• Analizar el comportamiento dinámico de sistemas lineales, tanto en el dominio temporal como en el de la frecuencia.
• Evaluar la estabilidad y el rendimiento de sistemas de control mediante criterios analíticos y gráficos.
• Diseñar y sintonizar controladores clásicos (especialmente PID) en función de los requerimientos del sistema.
• Utilizar herramientas de simulación para validar modelos y controladores.
• Conocer los elementos básicos de los sistemas de automatización industrial, incluyendo PLCs, sensores y actuadores.
• Aplicar los conocimientos adquiridos en el diseño e implementación de soluciones de control para sistemas mecatrónicos reales o simulados.
• Fomentar la capacidad de análisis, resolución de problemas y trabajo en equipo en el contexto de la ingeniería de control.
4. Competencias a adquirir | Resultados de Aprendizaje
Básicas / Generales | Conocimientos.
C3. Diseñar y desarrollar algoritmos sobre sistemas de control aplicados a la ingeniería mecatrónica.
C5. Conocer los sistemas de sensores y actuadores electrónicos, así como su implementación y conectividad en sistemas de mecatrónica
Específicas | Habilidades.
H1. Aplicar con destreza las herramientas informáticas más relevantes en el desarrollo de un proyecto de ingeniería mecatrónica como Matlab, Simulink, OpenModelica, LabView, entre otras, y hacer uso de la IA para su optimización.
H6. Diseñar, programar e implementar automatismos industriales centralizados y distribuidos. (DCS, SCADA, HMI, PLC).
H7. Implementar la programación en un sistema mecatrónico a partir de lenguajes como Matlab o Python. Matlab, Python, C++, o Java, entre otros.
H8. Utilizar la bibliografía especializada para actualizar de modo autónomo los conocimientos sobre los materiales, las tecnologías de fabricación y el diseño y aplicaciones dentro de la ingeniería mecatrónica.
Transversales | Competencias.
K2. Aplicar herramientas de software en el diseño y simulación de un sistema mecatrónico, y su optimización a partir de IA.
K5. Aplicar técnicas de IA para control optimizado, automatización, electrónica e informática en el diseño de sistemas y productos en la ingeniería mecatrónica.
5. Contenidos
Teoría.
Tema 1: Introducción a los Sistemas de Control
Tema 2: Diseño Lógico en Automática
Tema 3: Modelado de Sistemas Dinámicos. Análisis Temporal y Estabilidad.
Tema 4: Diseño de Controladores Clásicos
Tema 5: Automatización Industrial
Tema 6: Simulación
Práctica.
Se llevarán a cabo prácticas sobre los conceptos vistos en teoría que permitan validar los diseños de sistemas de control, tanto en laboratorio, como en aula de informática.
6. Metodologías Docentes
La asignatura introduce los principios fundamentales de los sistemas de control automático aplicados a la ingeniería mecatrónica. Se estudian técnicas clásicas y modernas para el modelado, análisis y diseño de controladores, con énfasis en sistemas físicos reales y simulación computacional.
Interacción con el alumno
Se fomentará la interacción del alumno por diferentes vías:
● Clases presenciales: dado el carácter teórico-práctico de la asignatura, el profesor estará presente en el aula para resolver las posibles dudas de los alumnos y guiarlos en la realización de los ejercicios.
● Tutorías: los alumnos podrán acudir a tutorías para cualquier consulta relativa a la materia.
● Espacio virtual: se dispondrá de la herramienta Studium para el intercambio de información con los alumnos (apuntes, ejercicios, etc.) y como medio de comunicación (foros, chats, wikis, etc.). Las entregas de trabajos también se realizarán desde esta plataforma.
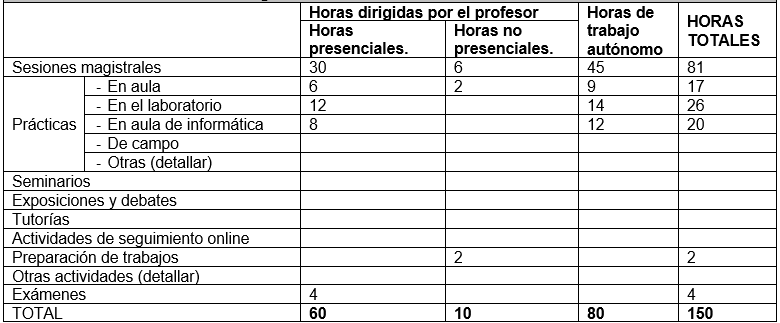
7. Distribución de las Metodologías Docentes
8. Recursos
Libros de consulta para el alumno.
● Bolton, W. (2015). Programmable logic controllers (6th ed.). Newnes.
● Dorf, R. C., & Bishop, R. H. (2011). Sistemas de control moderno (12.ª ed.). Pearson Educación.
● Franklin, G. F., Powell, J. D., & Emami-Naeini, A. (2015). Feedback control of dynamic systems (7th ed.). Pearson.
● Nise, N. S. (2015). Control systems engineering (7th ed.). Wiley.
● Ogata, K. (2010). Ingeniería de control moderna (5.ª ed.). Pearson Educación.
9. Evaluación
Criterios de evaluación.
Se utilizará el sistema de calificaciones vigente (RD 1125/2003) artículo 5º. Los resultados obtenidos por el alumno en cada una de las materias del plan de estudios se calificarán en función de la siguiente escala numérica de 0 a 10, con expresión de un decimal, a la que podrá añadirse su correspondiente calificación cualitativa: 0 - 4,9: Suspenso (SS), 5,0 - 6,9: Aprobado (AP), 7,0 - 8,9: Notable (NT), 9,0 - 10: Sobresaliente (SB). La mención de Matrícula de Honor podrá ser otorgada a alumnos que hayan obtenido una calificación igual o superior a 9,0. Su número no podrá exceder del 5% de los alumnos matriculados en una asignatura en el correspondiente curso académico, salvo que el número de alumnos matriculados sea inferior a 20, en cuyo caso se podrá conceder una sola Matrícula de Honor.
Sistemas de evaluación.
Evaluación continua: seguimiento de la evolución en clase del alumno, participación en clase, prácticas y trabajos realizados (incluyendo defensa de estos).
Exámenes teórico-prácticos.
Recomendaciones para la evaluación.

*En el examen teórico es necesario obtener una calificación mínima de 5 para aprobar la asignatura.
*Para la nota se tendrá en cuenta: Informe de las prácticas de laboratorio y entrega en clase de las prácticas de aula de informática (50%), examen práctico (50%).
*Para poder realizar la media se deberá tener como mínimo un 3.5 en cada una de las partes.
Recomendaciones evaluación:
La asistencia a clase y la participación del alumno unido al trabajo continuo permiten superar sin dificultad la asignatura.
Recomendaciones recuperación:
A cada alumno se le indicará, de forma individualizada, qué partes de la asignatura debe reforzar para poder superarla.